
Radar
Saviez-vous ...
Les articles de cette sélection écoles ont été organisés par sujet du programme d'études grâce aux bénévoles d'enfants SOS. Parrainage d'enfants aide les enfants du monde en développement à apprendre aussi.

Le radar est un système qui utilise électromagnétiques vagues d'identifier la gamme, l'altitude, la direction ou la vitesse des deux objets mobiles et fixes tels que les avions , les navires, les véhicules automobiles, les formations météorologiques et du terrain. Le terme RADAR a été inventé en 1941 en tant que acronyme pour Ra dio D ÉTECTION un e R anging. Le terme a depuis entré dans la langue anglaise comme un mot standard, radar, perdre la capitalisation. Radar a été initialement appelé RDF (Radio Direction Finder) au Royaume-Uni.
Un système radar comporte un émetteur qui émet soit ondes radio ou (plus généralement ces jours) micro-ondes qui sont réfléchies par la cible et détectées par un récepteur, généralement au même endroit que l'émetteur. Bien que le signal de retour est généralement très faible, le signal peut être amplifié. Cela permet radar pour détecter des objets à des distances où d'autres émissions, comme son ou la lumière visible , serait trop faible pour détecter. Le radar est utilisé dans de nombreux contextes, y compris météorologiques détection de précipitation, mesure des ondes de surface de l'océan, le contrôle du trafic aérien, la police détection de excès de vitesse le trafic, et par l'armée.
Histoire
Plusieurs inventeurs, scientifiques, et ingénieurs ont contribué à la développement de radar. Le premier à utiliser les ondes radio pour détecter "la présence d'objets métalliques éloignés" était Christian Hülsmeyer, qui en 1904 a démontré la faisabilité de détecter la présence d'un navire dans un brouillard dense, mais pas sa distance. Il a reçu Reichspatent Nr. 165 546 pour son dispositif de pré-radar en Avril 1904, et le brevet plus tard 169 154 pour une modification connexe pour allant. Il a également reçu un brevet en Angleterre pour son telemobiloscope sur 22 septembre 1904 .
Nikola Tesla, en Août 1917, d'abord établi des principes concernant la fréquence et le niveau de puissance pour les premières unités de radar primitifs. Il a déclaré: «[...] par leur [debout ondes électromagnétiques] utilisons nous pouvons produire à volonté, à partir d'une station émettrice, un effet électrique dans une région particulière du globe; [qui] nous pouvons déterminer la position relative ou cours d'un objet mobile, tel qu'un navire en mer, la distance parcourue par la même, ou sa vitesse ".
Avant la Seconde Guerre mondiale , l'évolution par les Américains (Dr. Robert M. testés la première page radar monopulse en 1934), les Allemands, les Français (brevet français n ° 788 795 en 1934) et surtout les Britanniques, qui furent les premiers à exploiter pleinement comme une défense contre les attaques d'aéronefs (GB593017 de brevet britannique par Robert Watson-Watt en 1935) a conduit à des premiers radars réels. Hongrois Zoltán Bay a produit un modèle de travail par 1936 à la laboratoire de Tungsram dans la même veine.
En 1934, Émile Girardeau, en collaboration avec les premiers systèmes de radar français, a déclaré qu'il a été construit systèmes radar "conçus selon les principes énoncés par Tesla".
La guerre a précipité la recherche pour trouver une meilleure résolution, plus de portabilité et plus de fonctionnalités pour la nouvelle technologie de la défense. Années d'après-guerre ont vu l'utilisation du radar dans des domaines aussi divers que le contrôle de la circulation aérienne, la surveillance météorologique, astrometry et contrôle de la vitesse du véhicule.
Principes
Réflexion
Les ondes électromagnétiques reflètent (dispersion) de tout changement important dans le ou diélectrique constantes diamagnétiques. Cela signifie qu'un objet solide dans l'air ou un vide, ou toute autre modification significative de la densité atomique entre l'objet et ce qui l'entoure, généralement disperser radar (radio) des ondes. Ceci est particulièrement vrai pour électriquement matériaux conducteurs, tels que le métal et fibre de carbone, faisant radar particulièrement bien adapté à la détection des avions et des navires. Matériau absorbant, contenant Radar résistif et parfois magnétiques substances, est utilisé sur des véhicules militaires de réduire radar réflexion. Ce est l'équivalent de la radio de peindre quelque chose de couleur foncée.
Les ondes radar se dispersent dans une variété de façons, en fonction de la taille (longueur d'onde) de l'onde radio et la forme de la cible. Si la longueur d'onde est plus courte que la taille de la cible, l'onde va rebondir d'une manière similaire à la façon dont la lumière est réfléchie par un miroir. Si la longueur d'onde est plus longue que la taille de la cible, la cible est polarisée (charges positives et négatives sont séparés), comme un antenne dipôle. Ceci est décrit par La diffusion de Rayleigh, un effet qui crée le ciel bleu de la Terre et rouge couchers de soleil. Lorsque les deux échelles de longueur sont comparables, il peut y avoir résonances. Les premiers radars utilisés très long longueurs d'onde plus grands que les cibles et reçu un signal vague, alors que certains systèmes modernes utilisent plus courte (quelques longueurs d'onde centimètres ou plus courte) Cette image peut objets aussi petit qu'une miche de pain.
Des ondes radio courtes reflètent de courbes et les coins, d'une manière similaire à luire d'une pièce arrondie du verre. Les cibles les plus réfléchissants pour courtes longueurs d'onde ont angles de 90 ° entre le des surfaces réfléchissantes. Une structure composée de trois surfaces planes réunis à un seul coin, comme le coin sur une boîte, sera toujours réfléchir les ondes entrant son ouverture directement vers la source. Ces soi-disant réflecteurs en coin sont couramment utilisés comme réflecteurs radar pour faire autrement objets difficiles à détecter plus faciles à détecter, et sont souvent trouvés sur les bateaux afin d'améliorer leur détection dans une situation de sauvetage et de réduire les collisions. Pour des raisons similaires, les objets de tenter d'éviter la détection seront angle leurs surfaces de façon à éliminer les angles intérieurs et éviter les surfaces et les bords perpendiculaires à directions de détection probables, ce qui conduit à "bizarre" la recherche avions furtifs. Ces précautions ne éliminent pas complètement en raison de la réflexion diffraction, en particulier à des longueurs d'onde. Demi-longueur d'onde des fils ou des bandes de matériau conducteur longs, tels que ivraie, sont très réfléchissante, mais ne dirige pas l'énergie diffusée vers la source. La mesure dans laquelle un objet réfléchit ou diffuse des ondes radio est appelée sa Section de radar.
équation radar
La quantité de puissance P r retour à l'antenne de réception est donné par l'équation de radar:
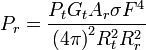
où
- P t = puissance de l'émetteur
- G t = gain de l'antenne d'émission
- A r = ouverture effective (régional) de l'antenne de réception
- σ = Radar de section transversale, ou le coefficient de diffusion, de la cible
- F = facteur de propagation de motif
- Rt = distance de l'émetteur vers la cible
- R r = la distance de la cible vers le récepteur.
Dans le cas courant où l'émetteur et le récepteur sont au même endroit, R t = R r R et le terme t r R ² ² peut être remplacé par R 4, où R est la distance. Cela donne:
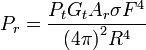
Cela montre que la puissance reçue diminue à mesure que la quatrième puissance de la gamme, ce qui signifie que la puissance réfléchie à partir de cibles éloignées est très, très faible.
L'équation ci-dessus avec F = 1 est une simplification pour les vide sans interférence. Les comptes de facteur de propagation pour les effets de par trajets multiples et l'observation et dépend des détails de l'environnement. Dans une situation du monde réel, effets affaiblissement sur le trajet devraient également être considérés.
Autres développements mathématiques en traitement du signal radar comprennent analyse temps-fréquence ( Weyl Heisenberg ou ondelettes), ainsi que la chirplets transformer ce qui rend l'utilisation du fait que les échos radar de cibles mobiles en général "chirp" (changent leur fréquence en fonction du temps, tout comme le chant d'un oiseau ou chauve-souris).
Polarisation
Dans le signal radar émis, le champ électrique est perpendiculaire à la direction de propagation, et cette direction du champ électrique est le polarisation de l'onde. Les radars utilisent horizontale, verticale, linéaire et la polarisation circulaire pour détecter différents types de réflexions. Par exemple, la polarisation circulaire est utilisé pour minimiser l'interférence causée par la pluie. Rendements de polarisation linéaire indiquent généralement des surfaces métalliques. Rendements de polarisation aléatoires indiquent généralement une fractale surface, comme des roches ou le sol, et sont utilisés par radars de navigation.
Ingérence
Les systèmes radar doivent surmonter plusieurs sources de signaux indésirables différents afin de se concentrer uniquement sur les objectifs réels d'intérêt. Ces signaux indésirables peuvent provenir de sources internes et externes, à la fois passifs et actifs. La capacité du système de radar de remédier à ces signaux indésirables définit son rapport signal sur bruit (SNR). SNR est défini comme le rapport d'une puissance de signal à la puissance de bruit dans le signal souhaité.
En termes moins techniques, le rapport signal sur bruit (SNR), compare le niveau d'un signal souhaité (comme cibles) pour le niveau de bruit de fond. Plus le SNR d'un système, le mieux ce est d'isoler les objectifs réels des signaux de bruit environnantes.
Bruit
bruit du signal est une source interne de variations aléatoires dans le signal, qui est généré intrinsèquement dans une certaine mesure par l'ensemble des composants électroniques. Bruit apparaît généralement variations aléatoires superposées sur le signal d'écho souhaité reçu dans le récepteur radar. Plus la puissance du signal désiré, plus il est difficile de discerner du bruit (similaire à essayer d'entendre un murmure tout en se tenant près d'une route très fréquentée). Par conséquent, les plus importantes sources de bruit apparaissent dans le récepteur et beaucoup d'efforts sont faits pour minimiser ces facteurs. Facteur de bruit est une mesure du bruit produit par un récepteur par rapport à un récepteur idéal, et ceci doit être minimisé.
Le bruit est également généré par des sources externes, surtout le rayonnement thermique naturelle de la scène de fond entourant la cible d'intérêt. Dans les systèmes de radar modernes, en raison de la haute performance de leurs récepteurs, le bruit interne est typiquement d'environ égal ou inférieur au bruit de scène extérieure. Une exception est si le radar est destiné à la hausse au ciel clair, où la scène est si froid qu'il génère très peu bruit thermique.
Il y aura également Scintiller bruit dû aux électrons de transit, mais en fonction de 1 / f, sera beaucoup plus faible que le bruit thermique lorsque la fréquence est élevée. Ainsi, dans l'impulsion radar, le système sera toujours hétérodyne. Voir fréquence intermédiaire.
Désordre
Clutter se réfère à fréquence radio réelle (RF) échos des cibles qui sont par définition sans intérêt pour les opérateurs de radar en général. Ces objectifs comprennent la plupart des objets naturels tels que terre, la mer, précipitations (comme la pluie, la neige ou la grêle), les tempêtes de sable, les animaux (en particulier les oiseaux), atmosphérique turbulence, et d'autres effets atmosphériques, tels que réflexions et ionosphère météores sentiers. Clutter peut également être retourné à partir d'objets fabriqués par l'homme tels que les bâtiments et, intentionnellement, par des contre-mesures radar comme ivraie.
Certains encombrement peut également être provoquée par une longue radar guide d'ondes entre l'émetteur-récepteur et l'antenne radar. Dans un typique indicateur de position du plan (PPI) de radar avec une antenne tournante, ce sera généralement être considéré comme un "soleil" ou "sunburst" dans le centre de l'écran que le récepteur répond aux échos de particules de poussière et RF erronée dans le guide. Réglage de la synchronisation entre le moment où l'émetteur envoie une impulsion et quand l'étage récepteur est activé réduira généralement le sunburst sans affecter la précision de la gamme, puisque la plupart sunburst est causée par une impulsion d'émission diffuse reflète avant qu'il ne quitte l'antenne.
Alors que certaines sources de fouillis peuvent être indésirables pour certaines applications radar (tels que les nuages de tempête pour les radars de défense aérienne), ils peuvent être souhaitables pour d'autres ( météorologiques radars dans cet exemple). L'image de fond est considérée comme une source d'interférences est passif, car il apparaît que, en réponse à des signaux radar émis par le radar.
Il existe plusieurs méthodes de détection et de neutralisation de l'encombrement. Beaucoup de ces méthodes se appuient sur le fait que l'encombrement tend à apparaître statique entre les balayages radar. Par conséquent, lorsque l'on compare les analyses ultérieures des échos, des objectifs souhaitables apparaîtront à se déplacer et tous les échos fixes peuvent être éliminés. Clutter de mer peut être réduite en utilisant la polarisation horizontale, tandis que la pluie est réduit avec polarisation circulaire (à noter que les radars météorologiques souhaitent pour l'effet inverse, en utilisant donc polarisation linéaire pour mieux détecter les précipitations). D'autres procédés tentent d'augmenter le rapport signal sur l'encombrement.
CFAR (taux de fausses alarmes constant, une forme de Automatic Gain Control, ou AGC) est une méthode se appuyant sur le fait que l'encombrement retourne beaucoup plus nombreux que les échos de cibles d'intérêt. Le gain du récepteur est automatiquement ajustée pour maintenir un niveau constant de désordre visible globale. Bien que cela ne aide pas détecter des cibles masquées par parasites environnants forte, elle aide à distinguer les sources cibles solides. Dans le passé, radar AGC est contrôlé électroniquement et affecté le gain de l'ensemble du récepteur radar. Comme radars évolué, AGC est devenu l'ordinateur-logiciel contrôlé et affecté le gain avec une plus grande granularité, dans les cellules de détection spécifiques.
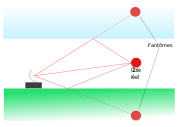
Clutter peut également provenir multiples échos de cibles valides dues à la réflexion du sol, canalisation atmosphérique ou réflexion ionosphérique / réfraction. Ce type d'encombrement spécifique est particulièrement gênant, car il semble se déplacer et de se comporter comme les autres (ponctuelles) cibles d'intérêt normaux, créant ainsi un fantôme. Dans un scénario typique, un écho de l'aéronef est trajets multiples réfléchie par le sol en dessous, apparaissant au récepteur comme cible identiques ci-dessous la bonne. Le radar peut essayer d'unifier les objectifs, les rapports de la cible à une hauteur incorrecte, ou - pire - l'éliminer sur la base de gigue ou une impossibilité physique. Ces problèmes peuvent être surmontés en incorporant une carte de terrain de l'environnement du radar et d'éliminer tous les échos qui semblent provenir en sous-sol ou au-dessus d'une certaine hauteur. Dans récent ATC algorithmes d'équipement radar sont utilisées pour identifier les fausses cibles en comparant les rendements d'impulsions de courant, à ces, ainsi que le calcul invraisemblances de retour adjacents en raison de hauteur calculée, la distance, et le calendrier de radar.
Jamming
Radar brouillage se réfère à des signaux de fréquence radio provenant de sources extérieures au radar, la transmission à la fréquence du radar et ainsi masquer les cibles d'intérêt. Jamming peut être intentionnelle, comme avec un guerre électronique (EW) tactique, ou non, comme avec les forces amies équipements fonctionnant qui transmet en utilisant la même gamme de fréquences. Le brouillage est considéré comme une source d'interférences est actif, car elle est initiée par des éléments extérieurs au radar et en général sans rapport avec les signaux radar.
Jamming est problématique au radar depuis le signal de brouillage ne doit voyager à une voie (du brouilleur au récepteur radar) alors que les échos radar voyagent deux façons (radar-cible-radar) et sont donc considérablement réduits au pouvoir par le temps ils reviennent au récepteur radar. Donc brouilleurs peuvent être beaucoup moins puissants que leurs radars coincé et encore masquer efficacement des cibles le long de la la ligne de mire du brouilleur au radar (lobe principal de brouillage). Jammers ont un effet supplémentaire d'affecter radars le long de l'autre ligne de sites, en raison de la récepteur radar de lobes secondaires (lobes latéraux de brouillage).
Lobe principal blocage ne peut généralement être réduite par le rétrécissement du lobe principal angle solide, et ne peut jamais être complètement éliminé en faisant face directement un brouilleur qui utilise la même fréquence et la polarisation du radar. Lobes secondaires brouillage peut être surmonté en réduisant les lobes secondaires de réception lors de la conception de l'antenne radar et en utilisant un antenne omnidirectionnelle de détecter et de ne pas tenir compte des signaux non-lobe principal. D'autres techniques anti-brouillage sont saut de fréquence et polarisation. Voir Contre-contre-mesures électroniques pour plus de détails.
Interférence est récemment devenu un problème pour Bande C (5,66 GHz) Les radars météorologiques avec la prolifération des 5,4 GHz WiFi équipement.
Radar traitement du signal
Mesure de distance
Temps de transport
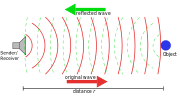
Une façon de mesurer la distance d'un objet est de transmettre une courte impulsion du signal radio (rayonnement électromagnétique), et mesurer le temps qu'il faut pour que la réflexion pour revenir. La distance est la moitié du produit de temps aller-retour (parce que le signal doit parcourir pour la cible, puis vers le récepteur) et la vitesse du signal. Depuis les ondes radio se propagent à la vitesse de la lumière (186,000 miles par seconde ou 300 000 000 mètres par seconde), la mesure précise de la distance nécessite une électronique de haute performance.
Dans la plupart des cas, le récepteur ne détecte pas le retour tandis que le signal est transmis. Grâce à l'utilisation d'un dispositif appelé un duplexeur, le radar commute entre émission et de réception à une vitesse prédéterminée. La distance minimale est calculée en mesurant la longueur de l'impulsion multipliée par la vitesse de la lumière divisée par deux. Afin de détecter des cibles plus rapprochées, il faut utiliser une longueur d'impulsion plus courte.
Un effet similaire impose une portée maximale ainsi. Si le retour de la cible vient quand la prochaine impulsion est envoyé, une fois de plus le récepteur ne peut pas faire la différence. Afin de maximiser gamme, on veut utiliser des durées plus longues entre les impulsions, ou communément appelé un temps de répétition des impulsions (PRT).
Ces deux effets ont tendance à être en désaccord avec l'autre, et il ne est pas facile de combiner les deux bonne gamme courte et une bonne longue portée en un seul radar. Ce est parce que les courtes impulsions nécessaires à une bonne distance minimale de diffusion ont moins d'énergie totale, rendant les rendements beaucoup plus petits et la cible plus difficile à détecter. Ce pourrait être compensé en utilisant plusieurs impulsions, mais cela permettrait de réduire encore la portée maximale. Donc, chaque radar utilise un type particulier de signaux. Radars à longue portée ont tendance à utiliser des impulsions longues avec de longs retards entre eux, et les radars de courte portée utilisent impulsions plus petites avec moins de temps entre eux. Ce motif d'impulsions et les pauses est connu comme le la fréquence de répétition des impulsions (ou PRF), et est l'une des principales façons de caractériser un radar. Comme l'électronique ont amélioré de nombreux radars peuvent maintenant changer leur PRF changeant ainsi leur gamme. Les nouveaux radars feu fait deux impulsions pendant une cellule, un pour courte portée (~ 6 miles) et un signal distinct pour de plus longues portées (~ 60 milles).
La distance résolution et les caractéristiques du signal reçu par rapport au bruit dépend fortement de la forme de l'impulsion. L'impulsion est souvent modulé pour obtenir de meilleurs résultats grâce à une technique connue sous le nom compression d'impulsions.
La distance peut également être mesurée en fonction du temps. Le radar Mile est la quantité de temps qu'il faut pour une impulsion radar de voyager un mille nautique, réfléchir sur une cible, et revenir à l'antenne radar. Depuis un mille nautique est défini comme exactement 1852 mètres, puis en divisant cette distance par la vitesse de la lumière (exactement 299 792 458 mètres par seconde), puis en multipliant le résultat par 2 (aller-retour = deux fois la distance), donne un résultat d'environ 12,36 microsecondes dans la durée.
La modulation de fréquence
Une autre forme de radar de mesure de la distance est basée sur modulation de fréquence. comparaison de fréquence entre deux signaux est considérablement plus précise, même avec une électronique plus âgés, le signal de cadencement. En changeant la fréquence du signal de retour et que l'on compare avec l'original, la différence peut être facilement mesurée.
Cette technique peut être utilisé dans continue radar à ondes, et est souvent trouvé dans les avions altimètres radar. Dans ces systèmes, un signal radar "support" est modulé en fréquence d'une manière prévisible, allant typiquement de haut en bas avec un onde sinusoïdale ou un motif en dents de scie à des fréquences audio. Le signal est ensuite envoyé par une antenne et reçu sur un autre, généralement situé sur le dessous de l'aéronef, et le signal peut être comparée en continu au moyen d'un modulateur de fréquence simple battement qui produit une fréquence tonalité audio à partir du signal de retour et une partie de le signal transmis.
Comme la fréquence du signal est en train de changer, au moment où le signal retourne à la diffusion de l'aéronef se est déplacée vers une autre fréquence. Le montant de ce changement est plus sur de plus longues périodes, de manière de plus grandes différences de fréquence moyenne une distance plus longue, le montant exact étant la «vitesse de rampe" sélectionné par l'électronique. La quantité de décalage est donc directement liée à la distance parcourue, et peut être visualisée sur un instrument. Ce traitement du signal est similaire à celui utilisé dans la détection de la vitesse Radar Doppler. Exemples de systèmes utilisant cette approche sont Azusa, MISTRAM, et UDOP.
Un autre avantage est que le radar peut fonctionner efficacement à des fréquences relativement basses, comparable à celle utilisée par la télévision UHF. Ce était important dans le développement précoce de ce type lors de haute génération de signaux de fréquence était difficile ou coûteux.
Mesure de la vitesse
La vitesse est le changement dans la distance à un objet par rapport au temps. Ainsi, le système existant pour mesurer la distance, combiné avec une mémoire capacité de voir où dernière a été la cible, est suffisant pour mesurer la vitesse. À une certaine époque la mémoire consistait en une décision d'utilisateur marques graisse crayon sur l'écran radar, et puis en calculant la vitesse en utilisant un glisser règle. Systèmes radar modernes exécutent l'opération équivalente plus rapide et plus précise à l'aide des ordinateurs.
Toutefois, si la sortie de l'émetteur est cohérente (phase de synchronisation), il est un autre effet qui peut être utilisé pour effectuer des mesures de vitesse quasi instantanée (pas de mémoire est nécessaire), connu sous le nom effet Doppler. La plupart des systèmes de radar modernes utilisent ce principe dans le impulsion-doppler du système radar. des signaux de retour à partir de cibles sont décalés l'écart de cette fréquence de base par l'intermédiaire de l'effet Doppler qui permet le calcul de la vitesse de l'objet par rapport au radar. L'effet Doppler ne est en mesure de déterminer la vitesse relative de la cible le long de la ligne de visée du radar pour la cible. Toute composante de vitesse de la cible perpendiculaire à l'axe de visée ne peut pas être déterminé en utilisant l'effet Doppler seul, mais il peut être déterminé par le suivi de la cible azimut au fil du temps. Des informations complémentaires sur la nature des rendements Doppler peut être trouvée dans le radar caractéristiques du signal article.
Il est également possible de réaliser un radar sans aucune pulsation, appelée radar à onde continue (CW radar), en envoyant un signal très pur d'une fréquence connue. CW radar est idéal pour la détermination de la composante radiale de la vitesse de la cible, mais il ne peut pas déterminer la gamme de la cible. CW radar est généralement utilisé par les forces de la circulation pour mesurer la vitesse du véhicule rapidement et avec précision où plage est pas important.
Réduction des effets d'interférence
Le traitement du signal est utilisée dans des systèmes de radar pour réduire les effets d'interférences radar . des techniques de traitement de signal comprennent Visualisation des cibles mobiles (MTI), impulsions Doppler, la détection de cible mobile (MTD) processeurs, corrélation avec les radar secondaire de surveillance (SSR) cibles, espace-temps traitement adaptatif (STAP), et piste avant détecter (TBD). Taux constant de fausse alarme (CFAR) et modèle numérique de terrain (MNT) de traitement sont également utilisés dans des environnements de fouillis.
Terrain Et Extraction piste
Radar rendements vidéo sur appareils peuvent être soumis à un processus d'extraction de l'intrigue que des signaux parasites et interférents sont éliminés. Une séquence des rendements cibles peut être contrôlé par un dispositif connu comme un extracteur de tracé. Les rendements en temps réel non pertinentes peuvent être retirés de l'information affichée et une seule parcelle affiché. Une séquence de parcelles peut alors être contrôlée et une 'piste' formé, facilitant ainsi l'identification d'une cible de l'avion véritable travers échos radar non désirées et non pertinentes.
l'ingénierie de Radar
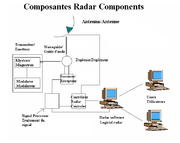
Un radar dispose de différents éléments:
- Un émetteur qui génère le signal radio avec un oscillateur tel qu'un ou un klystron magnétron et commande la durée d'une modulateur.
- Un guide d'ondes qui relie l'émetteur et l'antenne.
- Un Duplexeur qui sert de commutateur entre l'antenne et l'émetteur ou le récepteur de signal lorsque l'antenne est utilisée dans les deux situations.
- Un récepteur. Connaissant la forme du signal reçu souhaité (une impulsion), un récepteur optimal peut être conçu en utilisant un Filtre adapté.
- Une section électronique qui contrôle tous ces dispositifs et l'antenne pour effectuer le balayage radar ordonnée par un logiciel.
- Un lien vers les utilisateurs finaux.
La conception de l'antenne
Les signaux radio diffusés à partir d'une seule antenne se propage dans toutes les directions, et même une seule antenne recevront également des signaux de toutes les directions. Cela laisse le radar avec le problème de décider où l'objet cible est situé.
Les premiers systèmes ont tendance à utiliser antennes de diffusion omnidirectionnelle, avec antennes de réception directionnels qui ont été signalées dans diverses directions. Par exemple, le premier système d'être déployé, Chain Home, utilisé deux antennes droites au angle droit pour la réception, chacun sur un affichage différent. Le rendement maximal serait détectée par une antenne à angle droit par rapport à la cible, et un minimum avec l'antenne pointée directement vers elle (extrémité). L'opérateur pourrait déterminer la direction à une cible par tourner l'antenne pour une affichage montre un maximum tandis que l'autre représente un minimum.
Une limitation sérieuse de ce type de solution est que la diffusion est envoyée dans toutes les directions, de sorte que la quantité d'énergie dans la direction en cours d'examen est une petite partie de celle transmise. Pour obtenir une quantité raisonnable de pouvoir de la «cible», l'antenne d'émission doit également être directionnelle.
Réflecteur parabolique
Plus de systèmes modernes utilisent un dirigeable parabolique "plat" pour créer un faisceau de diffusion serré, typiquement en utilisant le même plat que le récepteur. De tels systèmes se combinent souvent deux fréquences radar dans la même antenne afin de permettre le pilotage automatique, serrure ou radar.
Réflecteurs paraboliques peuvent être des paraboles symétriques ou paraboles gâtés:
- Antennes paraboliques symétriques produire un faisceau étroit "crayon" à la fois dans les dimensions X et Y et ont par conséquent un gain plus élevé. Le NEXRAD Pulse-Doppler radar météorologique utilise une antenne symétrique pour effectuer des analyses volumétriques détaillées de la atmostphere.
- Antennes paraboliques nuls produisent un faisceau étroit dans une dimension et un faisceau relativement large dans l'autre. Cette fonction est utile si la détection de cible sur une large plage d'angles est plus important que l'emplacement de la cible en trois dimensions. La plupart des radars de surveillance 2D utilisent une antenne parabolique gâtés avec une largeur de faisceau azimutal étroit et large largeur de faisceau vertical. Cette configuration de faisceau permet à l'opérateur de radar pour détecter un aéronef à une azimut spécifique, mais à une hauteur indéterminée. Inversement, soi-disant hauteur trouver radars "de Nodder" utilisent un plat avec une largeur de faisceau vertical étroit et large largeur de faisceau azimutal pour détecter un avion à une hauteur spécifique, mais avec une faible précision azimutale.
Types de scan
- Numérisation primaire: Une technique de balayage où l'antenne principale aérienne est déplacé pour produire un faisceau de balayage, des exemples comprennent scan circulaire, secteur scanner etc
- Analyse secondaire: Une technique de balayage où l'alimentation de l'antenne est déplacé pour produire un faisceau de balayage, par exemple inclure balayage conique, analyse du secteur unidirectionnel, commutation du lobe etc.
- Palmer balayage: Une technique de balayage qui produit un faisceau de balayage en déplaçant l'antenne principale et de son alimentation. Une analyse Palmer est une combinaison d'un balayage primaire et secondaire d'une numérisation.

Antenne à fentes
Appliquée de manière similaire au réflecteur parabolique guide à fentes est déplacée mécaniquement à numériser et est particulièrement adapté pour les systèmes de balayage de surface non-suivi, où le modèle vertical peut rester constante. Grâce à moindre coût et moins exposition au vent, à bord des navires, surface de l'aéroport, et les radars de surveillance portuaires maintenant utiliser cette préférence à l'antenne parabolique.
Multiéléments
Une autre méthode de direction est utilisé dans un radar à balayage électronique. Celui-ci utilise une réseau d'antennes semblables et convenablement espacés, la phase du signal de chaque antenne étant commandée individu de sorte que le signal est renforcée dans la direction souhaitée et annule dans d'autres directions. Si les antennes individuelles sont dans un plan et le signal est appliqué à chaque antenne en phase avec les autres, alors le signal de renforcer dans une direction perpendiculaire à ce plan. En modifiant la phase relative du signal envoyé à chaque antenne la direction du faisceau peut être déplacé en raison de la direction d'interférence constructive se déplace. Parce que les radars à balayage électronique ne nécessitent pas de physique mouvement le faisceau peut numériser à des milliers de degrés par seconde, assez rapide pour irradier et suivre de nombreux objectifs individuels, et encore lancer une recherche de grande envergure périodiquement. Il suffit de retourner une partie des antennes ou désactiver, le faisceau peut être réparti pour la recherche, se est rétréci pour le suivi, ou même divisée en deux ou plusieurs radars virtuels. Cependant, le faisceau ne peut pas être efficacement dirigé aux petits angles au plan du tableau, donc pour une couverture complète des tableaux multiples sont nécessaires, généralement disposées sur les faces d'une pyramide triangulaire (voir photo).
Radars à balayage électronique ont été en usage depuis les premières années de l'utilisation du radar dans la Seconde Guerre mondiale , mais les limites de l'électronique conduit à assez faible précision. Radars à balayage électronique ont été initialement utilisées pour missile défense. Ils sont le cœur du navire-Borne Aegis système de combat, et de la Système de missiles Patriot, et sont de plus en plus utilisé dans d'autres domaines, car l'absence de pièces mobiles les rend plus fiable, et permet parfois une antenne beaucoup plus efficace, utile dans les applications d'avions de chasse qui offrent seulement un espace confiné pour balayage mécanique.
Comme le prix de l'électronique a chuté, les radars à balayage électronique ont de plus en plus commun. Presque tous les systèmes de radars militaires modernes sont fondées sur les tableaux progressive, où le petit supplément est bien compensé par l'amélioration de la fiabilité d'un système sans pièces mobiles. Conceptions traditionnelles mobile antennes sont encore largement utilisés dans des rôles où le coût est un facteur important comme la surveillance de la circulation aérienne, les radars météorologiques et des systèmes similaires.
Radars à balayage électronique sont également appréciés pour une utilisation dans les avions, car ils peuvent suivre des cibles multiples. Le premier avion à utiliser un radar à balayage électronique est le B-1B Lancer. Le premier chasseur d'aéronef à utiliser radar à balayage électronique a été le Mikoyan MiG-31. SBI-16 du MiG-31M Zaslon réseau phasé radar est considéré comme le radar de combattant le plus puissant du monde . -Réseau phasé interférométrie ou, synthèse d'ouverture techniques, en utilisant une variété de plats séparés qui passeront progressivement à une ouverture unique et efficace, ne sont généralement pas utilisés pour des applications radar, même se ils sont largement utilisés dans radioastronomie. À cause de la Diluée sort de la matrice, ces tableaux de multiples ouvertures, lorsqu'il est utilisé dans les émetteurs, le résultat en faisceaux étroits au détriment de la réduction de la puissance totale transmise à la cible. En principe, ces techniques pourraient augmenter la résolution spatiale, mais la puissance plus faible signifie que ce ne est généralement pas efficace. Synthèse d'ouverture par post-traitement des données de mouvement d'une source mobile unique, d'autre part, est largement utilisé dans les systèmes de radars aéroportés espace et (voir Radar à synthèse d'ouverture).
Les bandes de fréquences
Les noms de groupes traditionnels comme origine des noms de code pendant la Seconde Guerre mondiale et sont encore en usage militaire et l'aviation à travers le monde au 21e siècle. Elles ont été adoptées aux États-Unis par le IEEE, et à l'étranger par le UIT. La plupart des pays ont des règlements supplémentaires pour contrôler quelles parties de chaque bande sont disponibles pour un usage civil ou militaire.
Les autres utilisateurs du spectre radioélectrique, tels que laradiodiffusionet des contre-mesures électroniques (ECM) industries, ont remplacé les désignations militaires traditionnelles avec leurs propres systèmes.
| Nom de bande | Gamme de fréquences | Wavelength Range | Remarques |
|---|---|---|---|
| HF | 3-30 MHz | 10-100 m | systèmes radar côtières, over-the-radar transhorizon (OTH) radars; 'Haute fréquence' |
| P | <300 MHz | M + 1 | 'P' pour 'précédent', appliqué rétroactivement aux systèmes radar début |
| VHF | 50-330 MHz | 0,9 à 6 m | très longue portée, pénétrant dans le sol; 'Très haute fréquence " |
| UHF | 300-1000 MHz | 0,3-1 m | très longue portée (par exemple, les missiles balistiques d'alerte précoce), pénétrant dans le sol, feuillage pénétrante; 'Ultra haute fréquence " |
| L | 1-2 GHz | 15-30cm | longue portée de contrôle du trafic aérien et de surveillance; «L» pour «long» |
| S | 2-4 GHz | 7.5-15 cm | la borne de commande de la circulation aérienne, météorologique à long terme, radar maritime; 'S' pour 'short' |
| C | 4-8 GHz | De 3,75 à 7,5 cm | répéteurs de satellite; un compromis (d'où «C») entre X et S bandes; temps |
| X | 8-12 GHz | 2,5 à 3,75 cm | guidage de missiles, radar maritime, la météo, la cartographie à moyenne résolution et de surveillance au sol; dans le USA la gamme étroite 10,525 GHz ± 25 MHz est utilisée pour l'aéroport de radar. Nommé bande X parce que la fréquence était un secret pendant WW2. |
| Ku | 12-18 GHz | De 1,67 à 2,5 cm | la cartographie à haute résolution, l'altimétrie satellitaire; fréquence un peu moins de la bande K (d'où 'u') |
| K | 18-27 GHz | 1,11 à 1,67 cm | à partir allemand kurz , ce qui signifie «courte»; utilisation limitée en raison de l'absorption par la vapeur d'eau , de sorte que K u et K une ont été utilisés à la place pour la surveillance. K-bande est utilisée pour détecter les nuages par les météorologues, et par la police pour détecter les automobilistes pour excès de vitesse. Pistolets radars en bande K fonctionnent à 24,150 ± 0,100 GHz. |
| Kune | 27-40 GHz | 0,75 à 1,11 cm | la cartographie, à courte portée, la surveillance de l'aéroport; fréquence juste au-dessus la bande K (d'où 'a') photo radar, utilisé pour déclencher les caméras qui prennent des photos des plaques des voitures feux rouges de licence, fonctionne à 34.300 ± 0,100 GHz. |
| mm | 40-300 GHz | 7,5 mm - 1 mm | bande millimétrique, subdivisé comme ci-dessous. Les gammes de fréquences dépendent de la taille de guide d'ondes. Plusieurs lettres sont affectées à ces bandes par différents groupes. Ce sont de Baytron, une société aujourd'hui disparue qui a fait l'équipement d'essai. |
| Q | 40-60 GHz | 7,5 mm - 5 mm | Utilisé pour les communications militaires. |
| V | 50-75 GHz | 6,0 à 4 mm | Très fortement absorbée par l'atmosphère. |
| E | 60-90 GHz | 6,0 à 3,33 mm | |
| W | 75-110 GHz | 2,7 à 4,0 mm | utilisé comme un capteur visuel pour les véhicules expérimentaux autonomes, l'observation météorologique à haute résolution et l'imagerie. |
modulateurs de radar
Modulateurs, également appelés réseaux de formation d'impulsions ou en ligne (PFNS) agissent pour fournir les courtes impulsions de puissance à la magnétron. Cette technologie est connue comme la puissance pulsée. De cette manière, l'impulsion émise de rayonnement RF est maintenue à un, et généralement, de très courte durée définie. Les modulateurs sont constitués d'un générateur d'impulsions à haute tension formé à partir d'une alimentation en haute tension, et un commutateur à haute tension tel qu'un thyratron.
Un tube klystron peut également être utilisé en tant que modulateur, car il est un amplificateur, de sorte qu'il peut être modulé par sa faible signal d'entrée de courant.
Radar refroidissement
CoolanoletPAO (poly-alpha oléfine) sont les deux principaux liquides de refroidissement utilisés pour refroidir les équipements de radar aéroporté aujourd'hui.
Le US Navy a mis en place un programme nommé prévention de la pollution (P2) pour réduire ou éliminer le volume et la toxicité des déchets, les émissions atmosphériques et les rejets d'effluents. En raison de cette Coolanol est utilisé moins souvent aujourd'hui.
PAO est une composition de lubrifiant synthétique est un mélange d'un polyol ester mélangé avec des quantités efficaces d'un anti-oxydant , jaune sucette métallique et des inhibiteurs de rouille. Le mélange d'ester de polyol comprend une proportion majeure de poly (néopentylpolyol) de mélange de l'ester formé par réaction de poly ( pentaérythritol) des esters partiels avec au moins un C7 à C12 d'acide carboxylique mélangé avec un ester formé par réaction d'un polyol ayant au moins deux groupes hydroxyle et au moins un acide carboxylique en C8-C10. De préférence, les acides sont linéaires et d'éviter ceux qui peuvent provoquer des odeurs pendant l'utilisation. Additifs antioxydants efficaces comprennent secondaires de arylaminiques, triazole dérivé jaune sucette métallique et un acide aminé dérivé et primaire et secondaire substitué amine et / ou inhibiteur de diamine de la rouille.
Une composition liquide de refroidissement / de lubrifiant synthétique, comprenant un mélange d'esters de 50 à 80 pour cent en poids de poly (néopentylpolyol) ester formé par réaction d'un poly (néopentylpolyol) ester partiel et au moins un acide monocarboxylique linéaire ayant de 6 à 12 atomes de carbone, et de 20 à 50 pour cent en poids d'un ester de polyol formé par réaction d'un polyol ayant de 5 à 8 atomes de carbone et au moins deux groupes hydroxyle avec au moins un acide monocarboxylique linéaire ayant de 7 à 12 atomes de carbone, les pourcentages en poids sur la base du poids total de la composition.
Fonctions et les rôles radar

radars de détection et de recherche
- Early Warning (EW) Radar Systems
- Early Warning Radar
- Ground Control Intercept (GCI) Radar
- Airborne Early Warning (AEW)
- Over-the-Horizon (OTH) Radar
- Acquisition de cible (TA) Radar Systems
- Surface to-Air Missile (SAM) Systems
- Systèmes d'artillerie (AAA) Anti-Aircraft
- Surface recherche (SS) Radar Systems
- Surface Radar Recherche
- Radar de surveillance côtière
- Radar de surveillance Harbour
- Antisubmarine Warfare (ASW) Radar
- Hauteur Finder (HF) Radar Systems
- Radar Systems Gap Filler
radars de la menace
- Suivi cible (TT) des Systèmes
- Systèmes AAA
- Systèmes SAM
- Precision Approach Radar Systems (PAR)
- Systèmes Multi-Function
- lutte contre l'incendie Systems (FC)
- Mode d'acquisition
- Mode de suivi semi-automatique
- Mode Tracking Manuel
- Intercept Airborne (AI) Radars
- Mode de recherche
- TA Mode
- Mode de TT
- Cible Illumination Mode (TI)
- Missile orientation Mode (MG)
- lutte contre l'incendie Systems (FC)
systèmes de guidage de missiles
- Air-to-Air Missile (AAM)
- Air-surface missiles (ASM)
- Systèmes SAM
- Missiles surface-surface Systems (MSS)
Battlefield et de reconnaissance radar

- Systèmes de surveillance __gVirt_NP_NN_NNPS<__ Battlefield
- Radars Battlefield de surveillance
- Countermortar / Systèmes contrebatterie
- Shell radars de poursuite
- Système de cartographie aérienne
- Side Looking Airborne Radar (SLAR)
- Radar à synthèse d'ouverture (SAR)
- Radar de surveillance périmétrique (PSR)

- Systèmes de contrôle de la circulation aérienne
- Contrôle de la circulation aérienne (ATC) Radars
- Radar secondaire de surveillance (SSR) (surveillance d'aéroport Radar)
- Approche Ground Control (GCA) Radars
- Precision Approach Radar Systems (PAR)
- Équipement de mesure de distance (DME)
- Radio Beacons
- Radar Altimètre Systems (RA)
- Systems (ISF) de suivi de terrain Radar
Systèmes radar spatiaux et la gamme d'instrumentation
- Espace (SP) Tracking Systems
- Range Instrumentation (RI) Systems
- Relais vidéo / Systèmes de liaison descendante
- Radar basé dans l'espace
Les systèmes radar de détection météo
- Météo radar
- profileurs de vent
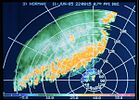
Storm Frontréflectivités sur un écran de radar météorologique (NOAA)

Vent profilage radar


Radars pour la recherche biologique
- Oiseau radar
- Insecte radar
- radar de surveillance (la plupart du temps X et bande S, soit primairesRadars ATC)
- Radar de poursuite (surtout bande X, à savoirles systèmes de contrôle de tir)
Grâce à des systèmes de radar muraux
Les systèmes radar qui fonctionnent en utilisant la technologie Ultra Wideband peut sentir un être humain derrière les murs. Ceci est possible étant donné que les caractéristiques de réflexion de l'être humain sont généralement supérieures à celles des matériaux typiques utilisés dans la construction. Cependant, depuis que les humains reflètent beaucoup moins d'énergie radar que le métal fait, ces systèmes nécessitent une technologie sophistiquée pour isoler des cibles humaines et en outre de traiter toute sorte d'image détaillée.