Autostereogram
Fundo para as escolas Wikipédia
Esta seleção Escolas foi originalmente escolhido pelo SOS Children para as escolas no mundo em desenvolvimento sem acesso à internet. Ele está disponível como um download intranet. patrocínio SOS Criança é legal!
Um autostereogram é uma imagem única estereograma (SIS), projetado para criar o ilusão visual de um período de três tridimensional (3D) a partir de uma cena de imagem bidimensional no cérebro humano. A fim de perceber formas 3D nestes autostereograms, o cérebro deve superar a coordenação normalmente automática entre concentrando-se e vergence.
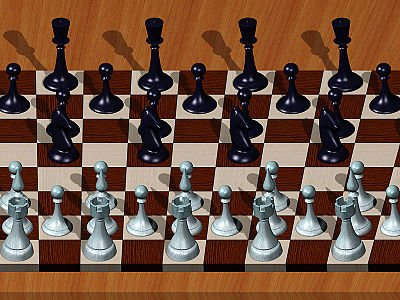
O tipo mais simples de autostereogram consiste em padrões repetitivos horizontalmente e é conhecido como um autostereogram papel de parede . Quando vistas com vergência adequada, os padrões repetidos parece flutuar acima ou abaixo do fundo. O Livros Magic Eye apresentam outro tipo de autostereogram chamado de autostereogram ponto aleatório . Um desses autostereogram é ilustrado acima, à direita. Neste tipo de autostereogram, todos pixel na imagem é calculado a partir de uma tira de teste padrão e um mapa de profundidade. Normalmente, uma cena 3D escondido surge quando a imagem é visualizada com a convergência correta.
Autostereograms são semelhantes às normais, exceto stereograms eles são vistos sem um estereoscópio. Um estereoscópio apresenta imagens 2D do mesmo objeto de ângulos ligeiramente diferentes para o olho esquerdo eo olho direito, permitindo que o cérebro para reconstruir o objeto original via disparidade binocular. Com uma autostereogram, o cérebro recebe repetindo padrões 2D de ambos os olhos, mas não combiná-los corretamente. Ele pares dois padrões adjacentes em um objeto virtual com base em ângulos de paralaxe erradas, colocando, assim, o objeto virtual em um profundidade diferente do da imagem autostereogram.
Há duas maneiras de um autostereogram podem ser vistos: Parede de olhos e vesgos. A maioria dos autostereograms (incluindo aqueles neste artigo) são projetados para ser visto em apenas um caminho, que é normalmente na parede olhos. Visualização de parede olhos exige que os dois olhos adoptar relativamente ângulo paralelo, enquanto visão vesga requer um relativamente ângulo convergente.
História
Em 1838, o cientista britânico Charles Wheatstone publicou uma explicação de estereopsia (percepção de profundidade binocular) decorrentes de diferenças nas posições horizontais de imagens nos dois olhos. Ele apoiou sua explicação, mostrando fotos com essas diferenças horizontais, estereogramas, separadamente para os olhos esquerdo e direito através de um Stereoscope ele inventou baseado em espelhos. Quando as pessoas olhavam para essas imagens planas, bidimensionais, eles experimentaram a ilusão de profundidade tridimensional.
Entre 1849 e 1850, David Brewster, um cientista escocês, melhorou o estereoscópio Wheatstone usando lentes em vez de espelhos, reduzindo assim o tamanho da maquineta.
Brewster também descobriram o "efeito papel de parede". Ele percebeu que olhando para padrões repetidos em wallpapers poderia enganar o cérebro em pares deles correspondentes como provenientes do mesmo objeto virtual em um plano virtual por trás dos muros. Esta é a base do papel de parede em estilo "autostereograms" (também conhecidos como stereograms imagem única).
Em 1959, Bela Julesz, um cientista da visão, psicólogo e MacArthur Fellow, inventou o estereograma de pontos aleatórios, enquanto trabalhava nos Laboratórios Bell em reconhecer objetos camuflados de fotos aéreas tiradas por aviões espiões. Na época, muitos cientistas de visão ainda pensava que percepção de profundidade ocorrido no próprio olho, ao passo que agora se sabe ser um processo complexo neurológica. Julesz usou um computador para criar um par estéreo de imagens aleatórias pontinho que, quando visto sob um estereoscópio, causaram o cérebro para ver formas 3D. Isso provou que a percepção de profundidade é um processo neurológico.
Em 1979, Christopher Tyler de Instituto Smith-Kettlewell, um estudante de Julesz e um psychophysicist visual, combinado as teorias por trás de uma imagem stereograms papel de parede e estereogramas de pontos aleatórios para criar a primeira "autostereogram de pontos aleatórios" (também conhecido como de imagem única estereograma de pontos aleatórios) . Este tipo de autostereogram permite que uma pessoa para ver formas em 3D a partir de uma única imagem 2D sem o auxílio de equipamentos ópticos.
Como eles funcionam
Simples wallpaper

Estereopsia, ou visão estéreo, é a mistura visual de dois similares mas não idênticas imagens em um, com resultante percepção visual de solidez e profundidade. No cérebro humano, os resultados estereoscópica de mecanismos complexos que formam uma impressão tridimensional, combinando cada ponto (ou conjunto de pontos) na visão de um olho com o ponto equivalente (ou conjunto de pontos) em vista da outra olho. Uso disparidade binocular, o cérebro deriva posições dos pontos no eixo z outra forma inescrutável (profundidade).
Quando o cérebro é apresentada com um padrão de repetição como papel de parede, ele tem dificuldade de harmonização vista os dois olhos 'com precisão. Ao olhar para um horizontalmente repetindo o teste padrão, mas convergindo os dois olhos em um ponto atrás do teste padrão, é possível enganar o cérebro em correspondência um elemento do padrão, como visto pelo olho esquerdo, com outro elemento (similar à procura), além da primeira, como pode ser visto pelo olho direito. Com a típica visão parede olhos , o que dá a ilusão de um avião que carrega o mesmo padrão, mas localizado atrás da parede real. A distância a que este plano está por trás da parede depende apenas do espaçamento entre os elementos idênticos.
Autostereograms usar esta dependência de profundidade no espaçamento para criar imagens tridimensionais. Se, ao longo alguma área da imagem, o padrão se repete em distâncias menores, que a área aparece mais perto do que o plano de fundo. Se a distância de repetição é mais longo alguma área, então a área que aparece mais distante (como um buraco no plano).
Pessoas que nunca foram capazes de perceber formas 3D escondidos dentro de uma autostereogram achar que é difícil de entender observações como, "a imagem 3D só vai sair do fundo, depois de olhar para a imagem de tempo suficiente", ou "os objetos 3D só vai emergir do fundo ". Ela ajuda a ilustrar como imagens 3D "emergem" do fundo da perspectiva de um segundo do espectador. Se os objetos virtuais 3D reconstruídas pelo cérebro do espectador autostereogram eram objetos reais, segundo um espectador observando a cena do lado veria esses objetos que flutuam no ar a imagem de fundo acima.
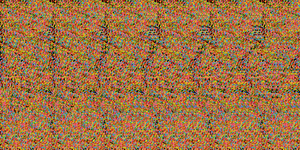
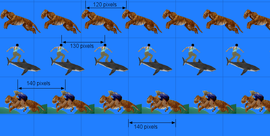
Os efeitos 3D no exemplo autostereogram são criados por repetir os ícones cavaleiro tigre cada 140 pixels no plano de fundo, o piloto tubarão ícones cada 130 pixels no segundo plano, e os ícones de tigre cada 120 pixels no plano mais alto. Quanto mais próximo um conjunto de ícones são embalados na horizontal, quanto maior eles são levantadas a partir do plano de fundo. Esta distância de repetição é referida como a profundidade ou o valor do eixo z de um padrão particular no autostereogram. O valor de profundidade é também conhecido como Valor Z-buffer.
 |  |
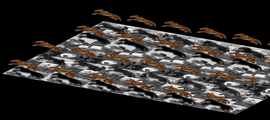
O cérebro é capaz de quase instantaneamente centenas de padrões repetidos em diferentes intervalos correspondentes, a fim de recriar a informação de profundidade correta para cada padrão. Um autostereogram pode conter cerca de 50 tigres de tamanhos variados, repetidos em intervalos diferentes contra um fundo complexo repetido. No entanto, apesar do arranjo caótico de padrões aparente, o cérebro é capaz de colocar todos os ícones tigre em sua profundidade adequada.
 |  |
Mapas de profundidade
 | ||||
 |  | |||
Autostereograms onde os padrões em uma linha específica se repetem horizontalmente com o mesmo espaçamento pode ser lido ou vesgo ou parede olhos . Em tais autostereograms, ambos os tipos de leitura irá produzir interpretação profundidade semelhante, com a excepção de que a leitura vesga inverte a profundidade (uma vez que as imagens são saiu agora empurrado para dentro).
No entanto, os ícones em uma linha não precisa ser organizado em intervalos idênticos. Um autostereogram com diferentes intervalos entre os ícones em uma linha apresenta estes ícones em diferentes planos profundidade para o espectador. A profundidade de cada ícone é calculada a partir da distância entre ele e o seu vizinho do lado esquerdo. Estes tipos de autostereograms são projetados para ser lido de uma única maneira, seja vesgo ou parede olhos. Todos os autostereograms neste artigo são codificados para visualização na parede eyed, a menos que especificamente marcados de outra forma. Um autostereogram codificado para visualização na parede olhos irá produzir padrões 3D incoerentes quando visto vesga. A maioria das fotos olho mágico também são projetados para visualização na parede olhos.
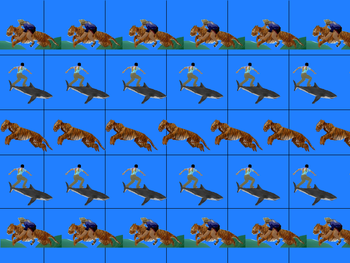
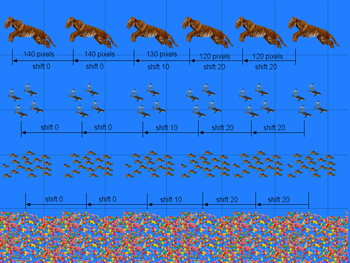
O seguinte autostereogram-parede olhos codifica três planos ao longo do eixo-x. O plano de fundo está no lado esquerdo da imagem. O plano mais alto é mostrado no lado direito da imagem. Existe um plano central estreita no meio do eixo x. Começando com um plano de fundo onde os ícones são espaçados em 140 pixels, pode-se elevar um ícone especial, deslocando-se um certo número de pixels para a esquerda. Por exemplo, o plano médio é criada deslocando um ícone 10 pixels para a esquerda, criando eficazmente um espaçamento que consiste de 130 pixels. O cérebro não depende de ícones inteligíveis que representam objetos ou conceitos. Neste autostereogram, padrões tornam-se menores e menores a partir do eixo-y, até que eles se parecem com pontos aleatórios. O cérebro ainda é capaz de combinar esses padrões de pontos aleatórios.
A relação de distância entre qualquer pixel e o seu homólogo no padrão equivalente à esquerda pode ser expressa em um mapa de profundidade. Um mapa de profundidade é simplesmente um imagem em tons de cinza que representa a distância entre um pixel e sua contraparte esquerda utilizando um valor de tons de cinza entre o preto eo branco. Por convenção, o mais perto a distância é, mais brilhante a cor se torna.
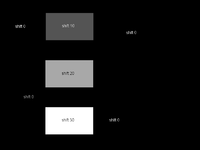
Usando essa convenção, um mapa de profundidade em tons de cinza para a autostereogram acima pode ser criado com preto, cinza e branco que representam mudanças de 0 pixels, 10 pixels e 20 pixels, respectivamente. Um mapa de profundidade é a chave para a criação de autostereograms de pontos aleatórios.
Random-dot
 |
Um programa de software pode dar uma uma imagem padrão de acompanhamento para produzir um mapa de profundidade e autostereogram. O programa de azulejos a imagem padrão horizontalmente para cobrir uma área cuja dimensão é idêntica para o mapa de profundidade. Conceitualmente, em cada pixel na imagem de saída, o programa procura o valor em tons de cinza do pixel equivalente na imagem do mapa de profundidade, e usa esse valor para determinar a quantidade de deslocamento horizontal necessária para o pixel.
Uma maneira de alcançar este objetivo é fazer com que o programa de varredura de cada linha na imagem de saída de pixel por pixel da esquerda para a direita. Semeia a primeira série de pixels em uma fileira a partir da imagem padrão. Em seguida, ele consulta o mapa de profundidade para recuperar os valores dos desvios apropriados para pixels subsequentes. Para cada pixel, que subtrai a mudança da largura da imagem do padrão para se chegar a um intervalo de repetição. Ele usa esse intervalo de repetição para procurar a cor do pixel contrapartida à esquerda e usa a cor como própria cor do novo pixel.
 |  |
Ao contrário dos planos de profundidade simples criadas por simples autostereograms papel de parede, mudanças sutis no espaçamento especificados pelo mapa de profundidade pode criar a ilusão de lisa gradientes em distância. Isto é possível porque o mapa de profundidade em tons de cinza permite que os pixels individuais possam ser colocados em um dos dois planos de profundidade n, onde n é o número de bits utilizados por cada pixel no mapa de profundidade. Na prática, o número total de aviões de profundidade é determinado pelo número de pixels usado para a largura da imagem padrão. Cada valor de tons de cinza deve ser traduzida em espaço de pixels, a fim de mudar pixels na autostereogram final. Como resultado, o número de planos de profundidade deve ser menor do que a largura do padrão.

O gradiente de aperfeiçoá-lo requer uma imagem padrão mais complexo do que o padrão de repetição de padrão papel de parede, tão tipicamente um padrão que consiste em pontos aleatórios repetidos é utilizado. Quando o autostereogram é visto com a técnica de visualização adequada, uma cena 3D escondido emerge. Autostereograms desta forma são conhecidos como Ponto aleatório Autostereograms.
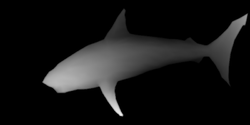
Gradientes suaves também pode ser alcançado com um padrão inteligível, assumindo que o padrão é bastante complexo e não tem grande, horizontal, emplastros monótonas. Uma área de grande pintado com a cor monótona, sem alteração na matiz e brilho não se presta ao pixel de deslocamento, como resultado do deslocamento horizontal é idêntico ao do programa original. O mapa a seguir profundidade de um tubarão com degradê suave produz um autostereogram perfeitamente legível, mesmo que a imagem 2D contém pequenas áreas monótonas; o cérebro é capaz de reconhecer essas pequenas lacunas e preencher os espaços em branco. Enquanto inteligíveis, padrões repetidos são usados em vez de pontos aleatórios, este tipo de autostereogram ainda é conhecida por muitos como um Ponto aleatório autostereogram, porque ele é criado usando o mesmo processo.
 |  |
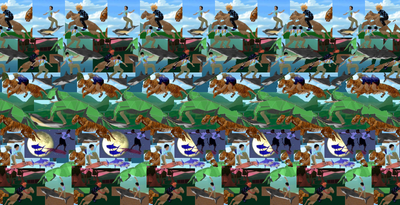
Animado
Quando uma série de autostereograms são mostrados um após o outro, da mesma maneira imagens em movimento são exibidas, o cérebro percebe uma animação autostereogram. Se todos os autostereograms na animação são produzidos utilizando o mesmo padrão de fundo, muitas vezes é possível ver os contornos fracos de partes do objeto 3D em movimento na imagem autostereogram 2D sem visualização de parede olhos; os pixels em constante mudança do objeto em movimento pode ser claramente distinguido do plano de fundo estático. Para eliminar esse efeito colateral, autostereograms animados usam frequentemente mudando de fundo, a fim de disfarçar as partes móveis.
Quando um padrão de repetição regular é visualizado em um Monitor CRT como se fosse um autostereogram papel de parede, geralmente é possível ver ondulações de profundidade. Isto também pode ser visto no fundo de, uma autostereogram-ponto aleatório estática. Estas são causadas pelas mudanças de lado na imagem devido a pequenas mudanças na sensibilidade deflexão (linearidade) da verificação de linha, que se tornam então interpretadas como profundidade. Este efeito é especialmente evidente na borda esquerda da tela onde a velocidade de verificação ainda está se acomodando após a fase de retorno. Este efeito está ausente de um LCD TFT.
Esta técnica foi usada como um dos possíveis métodos de visualização 3-D no Série Magic Carpet.
Mecanismos para a visualização
Muitos conselhos existe em ver a imagem tridimensional destinado em um autostereogram. Enquanto algumas pessoas podem simplesmente ver a imagem 3D em um autostereogram, outros devem aprender a treinar seus olhos para dissociar a convergência de olho lente de focalização.
Nem toda pessoa pode ver o 3D ilusão em autostereograms. Porque autostereograms são construídos com base em visão estéreo, as pessoas com uma variedade de deficiências visuais, mesmo aquelas que afetam apenas um olho, são incapazes de ver as imagens tridimensionais.
Pessoas com ambliopia (também conhecido como olho preguiçoso) são incapazes de ver as imagens tridimensionais. As crianças com visão pobre ou disfuncional durante um período crítico na infância pode crescer stereoblind, como seus cérebros não são estimuladas por imagens estéreo durante o período crítico. Se o problema tal visão não é corrigido na primeira infância, o dano se torna permanente eo adulto nunca será capaz de ver autostereograms. Estima-se que cerca de 1% a 5% da população é afectada por ambliopia.
Percepção 3D
Resultados da percepção de profundidade de muitas pistas visuais monoculares e binoculares. Para objectos relativamente perto dos olhos, visão binocular desempenha um papel importante na percepção de profundidade. A visão binocular permite que o cérebro para criar um único Imagem ciclópica e anexar um nível de profundidade para cada ponto da imagem ciclópica.
 |  |  |
O cérebro usa coordenar shift (também conhecido como paralaxe) de objetos combinados para identificar a profundidade desses objetos. O nível de profundidade de cada ponto da imagem combinada pode ser representado por um pixel de escala de cinzentos de uma imagem 2D em, para o benefício do leitor. Quanto mais próximo de um ponto aparece para o cérebro, o mais brilhante é pintado. Assim, a forma como o cérebro percebe profundidade usando visão binocular pode ser capturado por um mapa de profundidade (imagem ciclópica) pintado com base em coordenadas turno.


O olho funciona como uma câmera fotográfica. Tem um ajustável íris que pode abrir (ou fechar) para permitir que mais (ou menos) a entrada de luz no olho. Como acontece com qualquer câmera, exceto câmeras pinhole, ele precisa focar os raios de luz que entram através da íris (abertura numa câmara) de modo que se concentram num único ponto sobre a retina, a fim de produzir uma imagem nítida. O olho atinge esse objetivo, ajustando uma lente atrás da córnea para refratar a luz de forma adequada.
Estéreo-visão baseado em paralaxe permite que o cérebro para calcular profundidades de objectos relativos ao ponto de convergência. O ângulo de convergência que dá o cérebro o valor da profundidade de referência absoluto para o ponto de convergência a partir do qual profundidades absolutos de todos os outros objectos podem ser inferidas.
Percepção 3D simulado
Os olhos normalmente concentrar e convergem na mesma distância, num processo conhecido como convergência acomodativa. Isto é, quando se olha para um objeto distante, o cérebro nivela automaticamente as lentes e gira os dois globos oculares para visualização na parede olhos. É possível formar o cérebro para dissociar estas duas operações. Esta dissociação não tem nenhum propósito útil na vida cotidiana, porque impede o cérebro de interpretar objetos de uma forma coerente. Para ver uma imagem feita pelo homem, como um autostereogram onde os padrões são repetidos na horizontal, no entanto, a dissociação de se concentrar a partir de convergência é crucial.
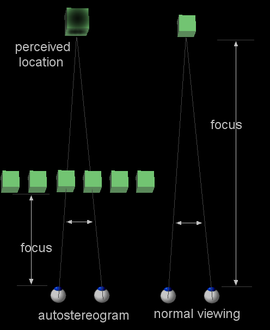
Ao focar as lentes em um autostereogram nas proximidades, onde os padrões são repetidas e ao convergir os olhos em um ponto distante a imagem autostereogram trás, pode enganar o cérebro em ver imagens 3D. Se os padrões recebidos pelos dois olhos são semelhantes o suficiente, o cérebro vai considerar esses dois padrões de um fósforo e tratá-los como provenientes do mesmo objeto imaginário. Este tipo de visualização é conhecido como visualização de parede olhos, porque os globos oculares adoptar uma convergência na parede de olhos num plano distante, mesmo que a imagem autostereogram é realmente mais perto dos olhos. Uma vez que os dois olhos convergem num plano mais longe, a localização do objecto imaginário percebida está por trás da autostereogram. O objeto imaginário também aparece maior do que os padrões no autostereogram por causa de escorço.
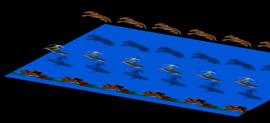
A seguir autostereogram mostra 3 linhas de padrões repetidos. Cada padrão é repetido em um intervalo diferente para colocá-lo em um plano de profundidade diferente. As duas linhas de não-repetição pode ser utilizado para verificar a visualização de parede olhos correcta. Quando o autostereogram é interpretado corretamente pelo cérebro usando visualização de parede eyed, e um olha para o golfinho no meio do campo visual, o cérebro deve ver dois conjuntos de linhas piscando, como resultado de rivalidade binocular.
 | 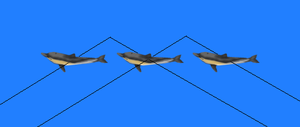 |

Enquanto há seis padrões de golfinhos no autostereogram, o cérebro deve ver sete golfinhos "aparentes" no plano da autostereogram. Este é um efeito colateral do emparelhamento de padrões semelhantes pelo cérebro. Existem cinco pares de padrões de golfinho nesta imagem. Isso permite que o cérebro para criar cinco golfinhos aparentes. O padrão mais à esquerda e mais à direita do padrão por si só não tem parceiro, mas o cérebro tenta assimilar estes dois padrões para o plano estabelecido profundidade de golfinhos adjacentes apesar rivalidade binocular. Como resultado, há sete golfinhos aparentes, com o mais à esquerda e mais à direita aqueles que aparecem com uma ligeira oscilação, não muito diferente dos dois conjuntos de linhas piscando observado quando um olha para o quarto golfinho aparente.
Por causa do encurtamento, a diferença de convergência necessário para ver padrões repetidos em diferentes planos faz com que o cérebro para atribuir tamanhos diferentes para padrões 2D com tamanhos idênticos. No autostereogram de 3 fileiras de cubos, enquanto que todos os cubos têm as mesmas dimensões físicas 2D, os que estão na linha superior parecer maior, porque são percebidas como mais longe do que os cubos sobre as segunda e terceira fileiras.
Visualizando técnicas
Tal como acontece com um câmera fotográfica, é mais fácil fazer o foco olho em um objeto quando a luz ambiente é intensa. Com iluminação intensa, o olho pode contrair a íris, ainda permitir que a luz suficiente para atingir a retina. Quanto mais se assemelha a um olho câmera pinhole, a menos que depende concentrando-se através da lente . Em outras palavras, o grau de dissociação entre a concentração e a convergência necessário para visualizar uma autostereogram é reduzida. Isto coloca menos pressão sobre o cérebro. Portanto, pode ser mais fácil para os telespectadores autostereogram pela primeira vez a "ver" suas primeiras imagens 3D se tentar essa façanha com uma iluminação brilhante.
Vergence controle é importante para ser capaz de ver imagens 3D. Assim, ele pode ajudar a concentrar-se em convergente / divergente os dois olhos para mudar as imagens que atingem os dois olhos, em vez de tentar ver uma clara, focada imagem. Apesar de lente ajusta reflexivamente, a fim de produzir imagens focadas, controle claro, voluntário sobre este processo é possível. Os suplentes espectador em vez mais convergentes e divergentes entre os dois olhos, no processo de ver "imagens duplas" tipicamente visto quando se está bebido ou não embriagado. Eventualmente, o cérebro irá corresponder com êxito um par de padrões relatados pelos dois olhos e bloqueio para esse determinado grau de convergência. O cérebro também irá ajustar lentes de olho para obter uma imagem clara do par combinado. Uma vez feito isso, as imagens em torno dos padrões combinados rapidamente se tornou claro como o cérebro combina padrões adicionais utilizando aproximadamente o mesmo grau de convergência.
Quando se move a atenção de um plano de profundidade para outro (por exemplo, a partir da linha superior do tabuleiro de xadrez para a linha inferior), os dois olhos precisam ajustar sua convergência para coincidir com o novo intervalo de repetição de padrões. Se o nível de mudança de convergência é muito alta durante esta mudança, por vezes, o cérebro pode perder a dissociação suado entre focalização e convergência. Para um visualizador pela primeira vez, portanto, pode ser mais fácil ver o autostereogram, se os dois olhos ensaiar o exercício de convergência em um autostereogram onde a profundidade de padrões através de uma linha específica permanece constante.
Numa autostereogram ponto aleatório, a imagem em 3D é geralmente mostrado no meio da autostereogram contra um plano de profundidade fundo (ver a autostereogram tubarão). Ela pode ajudar a estabelecer uma convergência adequada pela primeira vez por olhando para parte superior ou a parte inferior da autostereogram, onde os padrões são geralmente repetido em um intervalo constante. Uma vez que as travas do cérebro para o fundo plano de profundidade, que possui um grau de convergência de referência a partir da qual pode então corresponder a padrões, a diferentes níveis de profundidade no centro da imagem.
A maioria dos autostereograms, incluindo aqueles neste artigo, são projetados para visualização divergente (-parede de olhos). Uma forma de ajudar o cérebro concentrado em divergência vez de se concentrar é para manter a imagem na frente do rosto, com o nariz tocar a imagem. Com a imagem de tão perto de seus olhos, a maioria das pessoas não pode se concentrar na fotografia. O cérebro pode desistir de tentar mover os músculos dos olhos, a fim de obter uma imagem clara. Se um puxa lentamente para trás a imagem longe do rosto, enquanto abstendo-se de se concentrar ou olhos rotativa, em algum momento, o cérebro vai travar em um par de padrões quando a distância entre eles coincidir com o grau de convergência atual dos dois globos oculares.
Outra maneira é olhar para um objeto atrás da imagem em uma tentativa de estabelecer divergência adequada, mantendo parte da visão fixa na imagem para convencer o cérebro para focar a imagem. Um método modificado tem o olhar espectador para seu reflexo na superfície brilhante da imagem, que o cérebro percebe como sendo localizado duas vezes tão distantes como a própria imagem. Isso pode ajudar a persuadir o cérebro a adotar a divergência necessária enquanto se concentra na imagem nas proximidades.
Para autostereograms cruzados de olhos, uma abordagem diferente precisa ser tomada. O espectador pode segurar um dedo entre seus olhos e movê-lo lentamente em direção a imagem, mantendo seu foco no dedo em todos os momentos, até que ele está corretamente focado no local entre ele ea imagem que lhe permitirá visualizar a ilusão.
Terminologia
- Stereogram
- Foi originalmente usado para descrever um par de imagens 2D utilizados em estereoscópio para apresentar uma imagem 3D para os telespectadores. O termo é agora usado frequentemente permutavelmente com autostereogram ou autostereogram ponto aleatório. Mas o Dr. Tyler, inventor do autostereogram, consistentemente se refere a stereograms de imagem única como autostereograms para distingui-los de outras formas de estereogramas.
- Ponto aleatório Stereogram (RDS)
- Ponto aleatório estereograma, ou RDS, foi descrita originalmente um par de imagens 2D mostrando pontos aleatórios que, quando visto com um estereoscópio, produziram uma imagem 3D. O termo é agora usado frequentemente permutavelmente com autostereogram ponto aleatório.
- Stereogram Imagem Única (SIS)
- Imagem Única Stereogram (SIS) é um sinônimo de autostereogram. SIS difere da maioria dos estereogramas no seu uso de uma única imagem 2D em vez de um par estéreo. Quando a imagem 2D única é visto com convergência ocular adequada, faz com que o cérebro para fundir diferentes padrões percebidos pelos dois olhos em uma imagem virtual em 3D, sem a ajuda de qualquer equipamento óptico.
- Wallpaper autostereogram
- É uma imagem 2D em que os padrões são repetidas em vários intervalos para aumentar ou diminuir de cada padrão percebida localização 3D em relação a um plano de fundo virtual.
- Autostereogram de pontos aleatórios
- É também conhecido como Single Image Ponto aleatório Stereogram (SIRDS). Este termo também se refere a autostereograms onde são utilizados padrões inteligíveis em vez de pontos aleatórios.
- Imagem Única Stereogram texto aleatório (SIRTS)
- Imagem Única texto aleatório estereograma, ou SIRTS, é uma alternativa para SIRDS usando aleatório normalmente ASCII texto em vez de pontos para produzir uma forma de 3D Arte ASCII.